Математичне моделювання рухомого FMCW-радара: сигнал на вході приймача
DOI:
https://doi.org/10.20535/S002134702211005XКлючові слова:
математичне моделювання, радар, ефект Доплера, терагерцовий діапазон, моделювання сигналу на вході приймачаАнотація
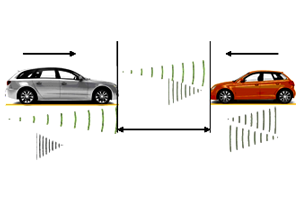
В роботі представлені моделі, що дозволяють оцінити вплив первинних параметрів рухомого радара на особливості вторинних сигналів, які виникають у приймачі при обчисленні дальності до рухомої цілі. Це дозволяє змоделювати різні методи обробки сигналів, визначити обмеження цих методів, та сформулювати рекомендації щодо побудови та апаратно-програмних рішень, які доцільно закласти в схему рухомого радара, який відстежує рухому ціль.
Показано, що застосовуючи рівнобічний трикутний закон ЛЧМ з періодом 20 мкс в сигналі зондування з носійною частотою 24 ГГц та девіацією частоти 250 МГц, можливо визначити дальність до рухомої цілі відносно рухомого радара. Відстань між ними визначається однозначно з використанням когерентної обробки прийнятих сигналів. Розглянуто ідеальний випадок розповсюдження сигналів.
Посилання
- M. A. Richards, Fundamentals of Radar Signal Processing. McGraw Hill, 2022, uri: https://www.accessengineeringlibrary.com/content/book/9781260468717.
- M. Češkovič, P. Kurdel, N. Gecejová, J. Labun, M. Laššák, “Evaluation of Doppler effect error affecting the radio altimeter altitude measurements,” Sensors, vol. 23, no. 1, p. 177, 2022, doi: https://doi.org/10.3390/s23010177.
- Л. В. Бородавкин, А. П. Бондаренко, “Уточненная зависимость разностной частоты от дальности и скорости для сигнала с линейной частотной модуляцией,” Электронный журнал «Труды МАИ», no. 89, p. 26, 2016, uri: https://trudymai.ru/upload/iblock/ffb/borodavkin_bondarenko_rus.pdf.
- А. Н. Детков, С. И. Жеребцов, И. А. Макаров, “Формирование тестового массива отсчётов выходного сигнала радиолокационного датчика с непрерывным излучением для имитации движущейся точечной цели,” Журнал радиоэлектроники, no. 8, p. 15, 2013, uri: http://jre.cplire.ru/jre/aug13/1/text.pdf.
- M. Penzin, N. Ilyin, “Modeling of Doppler frequency shift in multipath radiochannels,” Solnechno-Zemnaya Fiz., vol. 2, no. 2, pp. 57–63, 2016, doi: https://doi.org/10.12737/16505.
- “Automotive adaptive cruise control using FMCW technology,” Help Center MathWorks. https://www.mathworks.com/help/radar/ug/automotive-adaptive-cruise-control-using-fmcw-technology.html.
- M. A. Kosovets, O. I. Pavlov, L. N. Tovstenko, “Integral-differential models of characteristic functions of 3D terahertz FMCW radar,” in 2015 International Conference on Antenna Theory and Techniques (ICATT), 2015, pp. 1–3, doi: https://doi.org/10.1109/ICATT.2015.7136837.
- M. A. Kosovets, O. Pavlov, L. Tovstenko, “Studying the properties of different materials using terahertz 3D imager radar,” in 2017 XI International Conference on Antenna Theory and Techniques (ICATT), 2017, pp. 406–410, doi: https://doi.org/10.1109/ICATT.2017.7972676.
- P. You, Z. Ding, S. Liu, G. Zhang, “Dechirp‐receiving radar target detection based on generalized Radon‐Fourier transform,” IET Radar, Sonar Navig., vol. 15, no. 9, pp. 1096–1111, 2021, doi: https://doi.org/10.1049/rsn2.12094.
- Y.-J. Mon, “Simulation and implementation of signal processing for LFM radar using DSK 6713,” Electronics, vol. 12, no. 17, p. 3682, 2023, doi: https://doi.org/10.3390/electronics12173682.
- О. І. Павлов, О. В. Гусева, Є. М. Ящишин, Т. М. Наритник, В. Сайко, Г. Л. Авдєєнко, “Математичне моделювання роботи FMCW-радара: сигнал зондування,” Известия вузов. Радиоэлектроника, vol. 66, no. 12, pp. 726–735, 2023, doi: https://doi.org/10.20535/S0021347022090011.