Распределенная система обнаружения пространства помех с постоянной вероятностью ложных тревог с использованием правил нечеткого объединения
DOI:
https://doi.org/10.20535/S0021347019010011Ключові слова:
нечеткие правила, нечеткие пространства, постоянная вероятность ложных тревог, распределенная система, объединение данных, радиолокационное обнаружение, CMAP-CFARАнотація
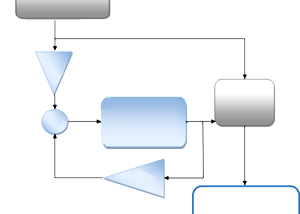
В работе рассмотрены характеристики распределенной адаптивной системы обнаружения карты помех с постоянной вероятностью ложных тревог CMAP-CFAR (clutter map constant false alarm rate) с использованием правил нечеткого объединения в условиях однородного и неоднородного фона. Предполагается, что датчики являются идентичными, и цель флуктуирует в соответствии с первой моделью Сверлинга на фоне белого гауссова шума с неизвестной дисперсией. Каждый детектор рассчитывает значение функции принадлежности к пространству ложных тревог на основании предыдущих выборок проверяемой ячейки и передает это значение в центр объединения. Эти значения объединяются в соответствии с правилами нечеткого объединения для получения глобальной функции принадлежности к пространству ложных тревог. Полученные результаты показали, что наилучшая характеристика эффективности получается при использовании нечеткого правила «алгебраического произведения», а вероятность обнаружения существенно возрастает с увеличением количества детекторов.Посилання
- Nitzberg, R. “Clutter map CFAR analysis,” IEEE Trans. Aerospace Electronic Systems, Vol. AES-22, No. 4, p. 419–421, July 1986. DOI: https://doi.org/10.1109/TAES.1986.310777.
- Hamadouche, M.; Barakat, M.; Khodja, M. “Analysis of the clutter map CFAR in Weibull clutter,” Signal Processing, Vol. 80, No. 1, p. 117-123, 2000. DOI: https://doi.org/10.1016/S0165-1684(99)00115-2.
- Hammoudi, Z.; Soltani, F. “Distributed CA-CFAR and OS-CFAR detection using fuzzy spaces and fuzzy fusion rules,” IEE Proc. - Radar Sonar Navigation, Vol. 151, No. 3, p. 135-142, 2004. DOI: https://doi.org/10.1049/ip-rsn:20040560.
- Bouchelaghem, H. E.; Hamadouche, M. “On the performance of CMAP-CFAR detection in distributed sensor networks,” Proc. of 2nd Int. Conf. on Embedded Systems in Telecommunications and Instrumentation, ICESTI, Oct. 2014, Annaba, Algeria. 2014.
- Bouchelaghem, H. E.; Hamadouche, M.; Soltani, F.; Baddari, K. “Adaptive clutter-map CFAR detection in distributed sensor networks,” AEU-Int. J. Electronics Commun., Vol. 70, No. 9, p. 1288-1294, 2016. DOI: https://doi.org/10.1016/j.aeue.2016.06.016.
- Bouchelaghem, H. E.; Hamadouche, M.; Soltani, F.; Badari, K. “Analysis of distributed clutter-map CFAR detection using fuzzy fusion rules,” Proc. of Int. Conf. on Mechanics and Aeronautics, CIMA 2016, 18-20 Oct. 2016, Algiers, Algeria. 2016.
- Bouchelaghem, H. E.; Hamadouche, M.; Soltani, F. “CACM-CFAR performance analysis,” Proc. of Int. Conf. on Technological Advances in Electrical Engineering, ICTAEE16, 24-26 Oct. 2016, Skikda, Algeria. 2016.
- Bouchelaghem, H. E.; Hamadouche, M. “Performance analysis of a new CFAR detector for heterogeneous environments,” Digital Signal Processing, Vol. 9, No. 2, p. 35-39, 2017. URI: http://www.ciitresearch.org/dl/index.php/dsp/article/view/DSP022017004.
- Bouchelaghem, H. E.; Hamadouche, M. “Fuzzy CACMAP-CFAR performance analysis,” Fuzzy Systems, Vol. 9, No. 3, p. 45-48, 2017. URI: http://www.ciitresearch.org/dl/index.php/fs/article/view/FS032017001.
- Эль Машад, Мохамед Б. "Обнаружение частично коррелированных χ2 целей CFAR радаром при наличии сторонних целей," Известия вузов. Радиоэлектроника, Т. 59, № 1, с. 3-33, 2016. DOI: https://doi.org/10.20535/S0021347016010015.
- Эль Машад, Мохамед Б. "Оценка эффективности усложненных версий СFAR обнаружителей при наличии сторонних целей," Известия вузов. Радиоэлектроника, Т. 59, № 12, с. 14-32, 2016. DOI: https://doi.org/10.20535/S0021347016110017.
- Papoulis, A. Probability, Random Variables and Stochastic Processes. New York: McGraw-Hill, 1984.
##submission.downloads##
Опубліковано
2019-01-21
Як цитувати
Боушелагем, Х. Е., Хамадуш, М., Солтани, Ф., & Баддари, К. (2019). Распределенная система обнаружения пространства помех с постоянной вероятностью ложных тревог с использованием правил нечеткого объединения. Вісті вищих учбових закладів. Радіоелектроніка, 62(1), 3–7. https://doi.org/10.20535/S0021347019010011
Номер
Розділ
Оригінальні статті