Адаптивний алгоритм радіолокаційного супроводження маневруючого БПЛА з ймовірнісною ідентифікацією даних за координатними та амплітудними ознаками
DOI:
https://doi.org/10.20535/S002134702212007XКлючові слова:
FMCW радар, хибні відмітки, тип руху цілі, строб супроводження, адаптивний фільтр, вирішальна статистика, апостеріорна ймовірність, ймовірність зриву супроводженняАнотація
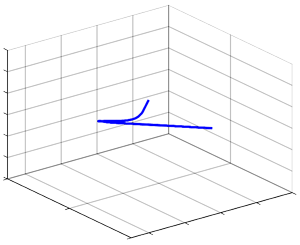
Особливістю малорозмірних БПЛА (МБПЛА), як об’єктів радіолокаційного спостереження, є екстремально низькі значення ефективної поверхні розсіювання, а також спроможність здійснювати інтенсивні маневри та зависати і не рухатись у просторі. Перспективним напрямком збільшення дальності виявлення МБПЛА РЛС є зниження порогу виявлення, що призводить до значного зростання ймовірності хибної тривоги і супроводжується появою значної кількості хибних відміток. Для підвищення ефективності супроводження МБПЛА при наявності хибних відміток, в якості додаткової інформації запропоновано використовувати вирішальні статистики (амплітудну інформацію) з виходу оптимального приймача первинної обробки сигналів. Розроблено адаптивний алгоритм радіолокаційного супроводження маневруючого МБПЛА з ймовірнісною ідентифікацією даних за координатними та амплітудними ознаками в прямокутній системі координат. Шляхом статистичного моделювання отримані точносні характеристики екстраполяції параметрів руху МБПЛА і ймовірності виявлення різних типів його руху. Розраховано ймовірності зриву супроводження і середнього часу супроводження траєкторії МБПЛА, а також проведено їх порівняння з відомим алгоритмом.
Посилання
- В. П. Рябуха, “Радиолокационное наблюдение беспилотных летательных аппаратов (обзор),” Известия вузов. Радиоэлектроника, vol. 63, no. 11, pp. 655–669, 2020, doi: https://doi.org/10.20535/S0021347020110011.
- С. И. Макаренко, А. В. Тимошенко, А. С. Васильченко, “Анализ средств и способов противодействия беспилотным летательным аппаратам. Часть 1. Беспилотный летательный аппарат как объект обнаружения и поражения,” Системы управления, связи и безопасности, no. 1, pp. 109–146, 2020, doi: https://doi.org/10.24411/2410-9916-2020-10105.
- А. С. Дудуш, В. О. Тютюнник, О. А. Резніченко, С. Ю. Гогонянц, “Сучасний стан та проблеми протидії маловисотним, низькошвидкісним та малорозмірним БПЛА,” Сучасні інформаційні технології у сфері безпеки та оборони, vol. 1, no. 31, pp. 121–131, 2018, doi: https://doi.org/10.33099/2311-7249/2018-31-1-121-131.
- M. Kunita, M. Sudo, T. Mochizuki, “Range measurement using ultrasound FMCW signals,” in 2008 IEEE Ultrasonics Symposium, 2008, pp. 1366–1369, doi: https://doi.org/10.1109/ULTSYM.2008.0331.
- E. Hyun, Y.-S. Jin, J.-H. Lee, “Moving and stationary target detection scheme using coherent integration and subtraction for automotive FMCW radar systems,” in 2017 IEEE Radar Conference (RadarConf), 2017, pp. 0476–0481, doi: https://doi.org/10.1109/RADAR.2017.7944250.
- A. A. Shpilka, A. Y. Myronchuk, A. O. Tkach, S. P. Overchuk, V. O. Katiuha, Y. A. Myronchuk, “The application of the on-board devices radio direction-finding in the navigation systems of drones,” Mil. Tech. Collect., no. 15, pp. 48–53, 2016, doi: https://doi.org/10.33577/2312-4458.15.2016.48-53.
- С. М. Костромицкий, Д. С. Нефедов, “Оценка энергетического выигрыша при обнаружении малоразмерных целей методом «сопровождение до обнаружения»,” Вестник Концерна ВКО «Алмаз–Антей», no. 3, pp. 67–78, 2022, doi: https://doi.org/10.38013/2542-0542-2022-3-67-78.
- D. K. Barton, Radar System Analysis and Modeling. Norwood, MA: Artech House, 2004.
- H. Meikle, Modern Radar Systems. Norwood, MA: Artech House, 2008.
- “The probabilistic data association filter,” IEEE Control Syst., vol. 29, no. 6, pp. 82–100, 2009, doi: https://doi.org/10.1109/MCS.2009.934469.
- В. И. Меркулов, В. С. Верба, А. Р. Ильчук, А. П. Кирсанов, Автоматическое Сопровождение Целей в РЛС Интегрированных Авиационных Комплексов. Многоцелевое Сопровождение. Том 3. Москва: Радиотехника, 2018, uri: https://publications.hse.ru/books/229379318.
- X. R. Li, “Tracking in clutter with strongest neighbor measurements. I. Theoretical analysis,” IEEE Trans. Autom. Control, vol. 43, no. 11, pp. 1560–1578, 1998, doi: https://doi.org/10.1109/9.728872.
- E. Brekke, O. Hallingstad, J. Glattetre, “Tracking small targets in heavy-tailed clutter using amplitude information,” IEEE J. Ocean. Eng., vol. 35, no. 2, pp. 314–329, 2010, doi: https://doi.org/10.1109/JOE.2010.2044670.
- Z. Li, G. Li, J. Tan, F. Tian, G. Jin, Y. Ren, “Low observable moving target tracking based on modified PDA-AI,” J. Infrared, Millimeter, Terahertz Waves, vol. 31, no. 10, pp. 1245–1256, 2010, doi: https://doi.org/10.1007/s10762-010-9684-2.
- L. M. Ehrman, W. D. Blair, “Probabilistic data association with amplitude information versus the strongest neighbor filter,” in 2007 IEEE Aerospace Conference, 2007, pp. 1–6, doi: https://doi.org/10.1109/AERO.2007.353040.
- S. Y. Zhuk, O. S. Neuimin, I. O. Tovkach, V. O. Chmelov, “Adaptive algorithm for tracking maneuvering targets in a complex jamming environment for a radar with range rate measurement,” in 2020 IEEE 15th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering (TCSET), 2020, pp. 249–254, doi: https://doi.org/10.1109/TCSET49122.2020.235433.
- Ю. М. В.А. Васин, И.Б. Власов, Егоров et al., Информационные Технологии в Радиотехнических Системах. Москва: МГТУ им. Н.Э. Баумана, 2003.
- Я. Д. Ширман, С. Т. Багдасарян, А. С. Маляренко, Д. И. Леховицкий, Радиоэлектронные Системы. Основы Построения и Теория: Справочник. Москва: Радиотехника, 2007.